

Computer Vision
Enabling computers and devices to understand what they see.


Video
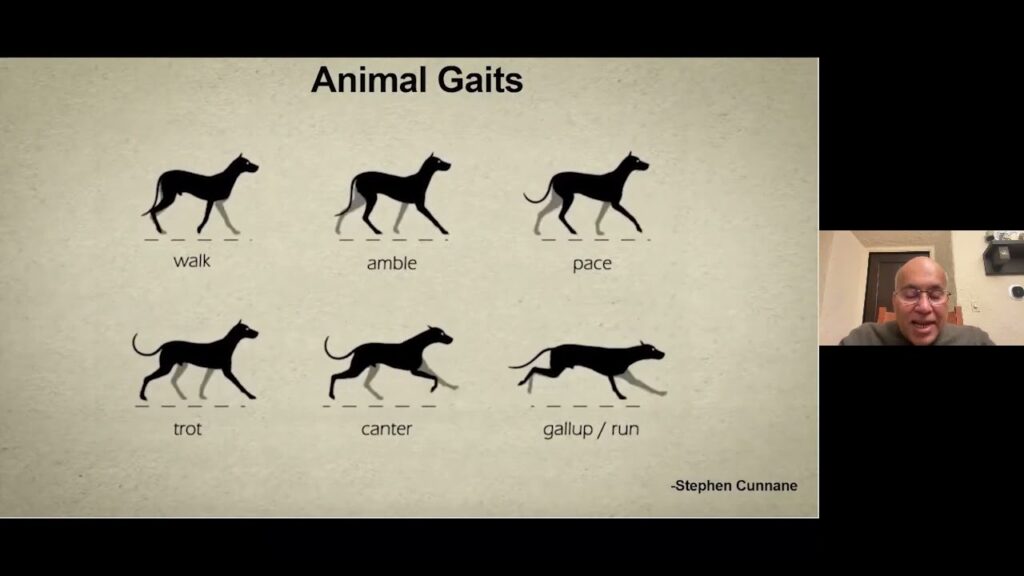
Learning to Walk
Legged locomotion is commonly studied and programmed as a discrete set of structured gait patterns, like walk, trot, gallop. However, studies of children learning to walk (Adolph et al) show that real-world locomotion is often…
Publication
Correlation-Aware Deep Tracking
Group
Applied Robotics Research
The democratization of Artificial intelligence, making Artificial Intelligence available to everyone, is the direction that we should push. Robotics, a part of artificial intelligence, should also push this direction, the democratization of Robotics. Traditionally, robots,…
Publication
Task-grasping from human demonstration
Project
Interactive Learning-from-Observation
Service-robot solutions to empower senior citizens to achieve more and to enhance their lives The goal of this project is to develop an interactive learning-from-observation (LfO) system in the service-robot domain so as to…