Publication

Mathematics
Video
Unsupervised Discovery of Objects and their Interactions for Common-Sense Physical Reasoning
Common-sense physical reasoning is facilitated by representing sensory percepts into discrete objects. By decomposing a complex visual scene into distinct objects, humans can describe relations between the objects and reason about their dynamics as well…

Video
Non-Convex Matrix Completion Against a Semi-Random Adversary
Matrix completion is a well-studied problem with many machine learning applications. In practice, the problem is often solved by non-convex optimization algorithms. However, the current theoretical analysis for non-convex algorithms relies heavily on the assumption…
Podcast
Tales from the Crypt(ography) Lab with Dr. Kristin Lauter
Episode 19, April 11, 2018 – Dr. Lauter tells us why she feels lucky to do math for a living, explains the singular beauty of elliptic curves and the singular difficulty of supersingular isogeny graphs,…

Microsoft Research Blog
Second homomorphic encryption standardization workshop delivers the goods
What an exciting two days at the Second Homomorphic Encryption Standardization Workshop at Massachusetts Institute of Technology. More than 70 participants from 10 countries gathered together for two intense days of panels, discussions and planning…

Video
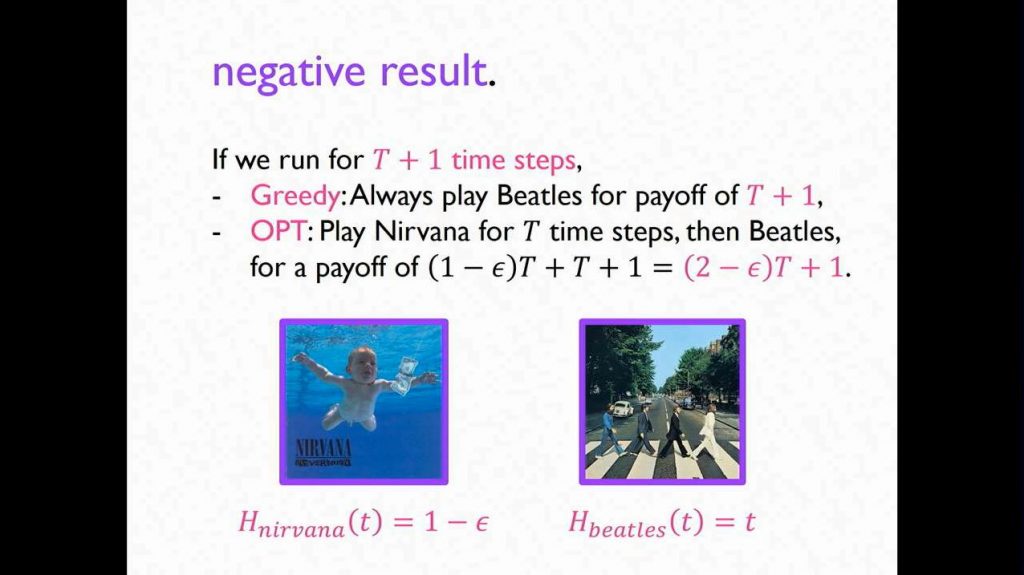
Recharging Bandits
We introduce a general model of bandit problems in which the expected payout of an arm is an increasing concave function of the time since it was last played. We first develop approximation algorithms for…
Video
Approximating General Norms by Euclidean Beyond the John’s Ellipsoid
John’s theorem proved in 1948 states that any centrally-symmetric convex body in R^d can be sandwiched by two ellipsoids up to a factor of sqrt{d}. In particular, it implies that any d-dimensional normed space embeds…